Синтезаторы частоты. Аналоговые измерительные устройства Применение интерполяции в ЦЗО
ЛЕКЦИЯ 7
СИНТЕЗАТОРЫ ЧАСТОТЫ В ПЕРЕДАЮЩИХ УСТРОЙСТВАХ
План лекции:
Основные понятия синтеза частот
Параметры систем синтеза частот
Классификация систем синтеза частот
Принципы действия различных типов синтезаторов
1 Основные понятия теории синтеза частот
Для переноса модулированного сигнала на требуемую частот для передачи необходимо сформировать колебание с частотой, лежащей в рабочем диапазоне передатчика.
В передающих устройствах для формирования требуемых частот могут использоваться синтезаторы частот .
Современные системы синтеза частот работают в диапазоне частот от долей герц до десятков гигагерц. Они используются в аппаратуре различного назначения, заменяя в ней простые автогенераторы.
Синтезом частот ‑ называют процесс получения одного или нескольких колебаний с нужными номинальными значениями частоты из конечного числа исходных колебаний путем преобразования частот, т.е. с помощью таких операций над колебаниями, при которых происходит сложение, вычитание частот и (или) умножение и деление их на рациональные числа.
Комплекс устройств, осуществляющих синтез частот, называют системой синтеза частот . Если система синтеза частот выполнена в виде конструктивно самостоятельного устройства, то ее называют синтезатором частот .
2 Параметры систем синтеза частот
Показатели, позволяющие оценить качество формирования выходного колебания (чистоту его спектральной линии, т.е. отличие его от моногармоники). Как техническое устройство любая ССЧ характеризуется рядом эксплуатационно-технических характеристик.
Основными эксплуатационно-техническими характеристиками ССЧ, используемых в возбудителях радиопередатчиков и в качестве гетеродинов радиоприемников, являются:
Совокупность номинальных значений частот, которые могут быть получены на выходе системы синтеза частот и следуют друг за другом через заданный интервал, называют сеткой частот .
Интервал
между соседними номинальными значениями
частоты, входящими в сетку частот,
называют шагом
сетки частот
.
B настоящее время,в радиопередающей и
радиоприемной аппаратуре широко
используются системы синтеза частот с
шагом сетки
 Гц, где а ‑ целое положительное или
отрицательное число или нуль. Кроме
того получили распространение системы
с шагом сетки
Гц, где а ‑ целое положительное или
отрицательное число или нуль. Кроме
того получили распространение системы
с шагом сетки
 Гц.
Гц.
3 Классификация систем синтеза частот
Колебания, являющиеся исходными в процессе синтеза частот, получают от высокостабильных источников, которые называют опорными генераторами (OГ 1 , ΟΓ 2 , ..., ОГ n на рис. 1). Частоты колебаний этих генераторов (f 01 , f 02 , …, f on на рис. В1) называют опорными частотами, точнее, первичными опорными частотами. Современные системы синтеза частот работают, как правило, от одного опорного генератора (рис. B.2). Такие системы называют одноопорными (когерентными) . При двух и более опорных генераторах системы называют многоопорными (некогерентными) .
При этом речь может идти об одном колебании, частота которого способна принимать любое из этих значений (см. рис. B.1a), или нескольких одновременно существующих колебаниях (см. рис. B.1б ). Первый случай встречается в возбудителях радиопередатчиков гетеродинах радиоприемников, второй - в многоканальной аппаратуре с частотным разделением каналов.

Обычно в одноопорных системах синтеза частот сначала устройство, называемое датчиком опорных частот (ДОЧ) или, точнее, датчиком вторичных опорных частот, формирует вспомогательные колебания, частоты которых называют вторичными опорными частотами. Затем устройство, называемое датчиком сетки частот (ДСЧ), вырабатывает из этих вспомогательных колебаний нужные выходные колебания, частоты которых образуют сетку. Некоторые колебания подаются на выход непосредственно от ДОЧ (см. рис. B.2).

Все типы ССЧ делят на два класса:
системы активного синтеза частот;
системы пассивного синтеза частот.
Системами активного синтеза частот или, сокращенно, системами активного синтеза называют системы когерентного синтеза частот, в которых фильтрация колебания синтезируемой частоты осуществляется с помощью активного фильтра в виде фазовой автоподстройки частоты (ФАПЧ).
Системами пассивного синтеза частот или, сокращенно, системами пассивного синтеза называют системы когерентного синтеза частот, в которых фильтрация колебания синтезируемой частоты осуществляется без применения ФАПЧ.
Системы того и другого классов могут быть выполнены целиком на аналоговых элементах или с применением цифровой элементной базы.
4 Пример работы синтезаторов на базе аналогового пассивного синтеза частот
Ha
рис. 1.4 представлена структурная схема
простейшей системы пассивного синтеза,
построенной на аналоговой элементной
базе. Колебание опорного генератора
(ОГ), имеющее частоту f 0
(первичная
опорная частота), подается на вход
датчика опорных частот. B
датчике опорных частот (ДОЧ)
с помощью умножителя и делителя частоты
вырабатываются два других колебания с
частотами
 и
и
 (вторичные опорные частоты), которые
подаются на входы двух генераторов
гармоник (ΓΓ 1
и
ΓΓ 2).
(вторичные опорные частоты), которые
подаются на входы двух генераторов
гармоник (ΓΓ 1
и
ΓΓ 2).
Каждый
из генераторов гармоник состоит из
формирователя импульсов (ФИ 1
и
ФИ 2)
и перестраиваемого полосового фильтра.
Первый преобразует входное квазигармоническое
колебание в последовательность очень
коротких (по сравнению с периодом этого
колебания) импульсов той же частоты
(равными соответственно
 и
и
 ).
Спектр этой последовательности содержит
множество высших гармоники; фильтр
настраивают на нужную из них и выделяют
ее. B результате на выходах генераторов
гармоник получают квазигармонические
колебания с частотами
).
Спектр этой последовательности содержит
множество высших гармоники; фильтр
настраивают на нужную из них и выделяют
ее. B результате на выходах генераторов
гармоник получают квазигармонические
колебания с частотами
 и
и
 .
.

Оба эти колебания подают на сумматор частот, состоящий из смесителя (См) и перестраиваемого полосового фильтра. Последний выделяет из спектра выходного продукта смесителя квазигармоническое колебание с нужной частотой


Смеситель обычно реализуется в виде балансного модулятора.
Пример.
Пусть
 ,
,
 ,
,
 может принимать значения 1, 2, 3, a
может принимать значения 1, 2, 3, a
 - значения 20, 21, 22, …, 39, то система имеет
диапазон частот с шагом сетки
- значения 20, 21, 22, …, 39, то система имеет
диапазон частот с шагом сетки
 от
от
Пассивный цифровой синтез частот
B системах пассивного цифрового синтеза формирование требуемой частоты осуществляются цифровой обработкой сигналов, и только на выходе системы используют аналоговый фильтр.
Структурная схема ССЧ на базе пассивного цифрового синтеза частот представлена на рис. 1.8.

Рис. 1.8. Структурная схема одного из вариантов системы пассивного цифрового синтеза
Опорный генератор формирует высокостабильное колебание с опорной частотой, используемой для получения требуемой частоты на выходе синтезатора. Это опорное колебание преобразуется в последовательность прямоугольных импульсов в формирователе импульсов (ФИ) путем ограничения по уровню сверху и снизу сформированного колебания. На выходе делителя частоты с переменным коэффициентом деления (ДПКД) последовательность импульсов на входе преобразуется в последовательность импульсов, которая следует с частотой, определяемой коэффициентом деления. Коэффициент деления N можно устанавливать равным любому целочисленному значению в пределах от N1 до N2. Его значение определяется счетно-решающим устройством исходя из частоты, установленной на пульте управления частотой. Счетчик на базе триггера формирует цифровые импульсы с требуемой скважностью. Полосовой фильтр (ПФ) восстанавливает из этой последовательности импульсов гармоническое колебание с необходимой частотой.
Рассмотрим пример. Пусть, например, требуется синтезировать сетку частот от 20 до 25 кГц с шагом 1 кГц. При этом частота опорного генератора соответствует 1 МГц.
В этом случае можно использовать коэффициенты деления N=25 (1 000 000/25 = 40 000) и N= 20 (1 000 000/20 = 50 000), при которых будут формироваться частоты 40 кГц и 50 кГц с шагом 2 кГц. В счетчике можно сформировать на базе этих частот поток прямоугольных импульсов со скважностью, равной 2, и частотой, которая может принимать все нужные значения. Наконец, можно с помощью полосового фильтра, имеющего частоты среза 20 кГц (нижнюю) и 30 кГц (верхнюю), выделить нужные колебания, подавив высшие гармоники.
8.4.1. Основные характеристики осциллографов.
1. Полоса пропускания или параметры переходной характерис тики (ПХ) Полоса пропускания - это диапазон частот, в котором амплитудно-частотная характеристика имеет спад не более 3 дБ относительно значения на опорной частоте. Опорная частота - частота, на которой спад АЧХ отсутствует. Значение спада АЧХ в децибелах находят из соотношения
(8.19)
где l f оп - размер изображения на опорной частоте: l f изм -размер изображения начастоте,для которой измеряется спадАХЧ.
2. Неравномерностьамплитудно-частотной характеристики.
3. Нелинейность амплитудной характеристики усилителей осциллографа β а . Значение Р а определяют поформуле
![]() (8.20)
(8.20)
где l -наиболее отличающийся от одного деления шкалы экрана размер изображения сигнала в любом месте рабочей части экрана.
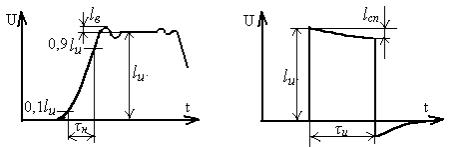
4. Качество воспроизведения сигнала в импульсном осциллогра фе.
Это качество часто характеризуется параметрами переходной характеристики, к которым относятся: время нарастания переходной характеристики τ н, величина выброса на ПХ, спад вершины изображения импульса.
Время нарастания переходной характеристики τ н определяют как время нарастания изображения импульса, в течение которого происходит отклонение луча от уровня 0,1 до уровня 0,9 амплитуды импульса (рис. 8.14, а).
а)б)
рис. 8.14.
Величину выброса на ПХ δ и измеряют на том же испытательном сигнале, что и время нарастания τ н , и определяют по формуле
![]() ,(8.21)
,(8.21)
где l в - амплитуда изображения выброса; l и - амплитуда изобра жения импульса.
Определение δ и производят на импульсах положительной и отрицательной полярностей.
Спад вершины изображения (рис.8.14, б) нормируют по относительному спаду вершины импульса, который определяют по формуле
,(8.22)
где l сп - значениевеличиныизображенияспадаимпульса;/ и - значение амплитудыизображенияимпульса.
ЗнаяпараметрыПХ,можноопределитьпараметрыАЧХ, и наоборот.Верхняя граничная частота полосы пропускания
(8.23)
где f в - выражена в мегагерцах; τ н - в наносекундах.
Нижняя граничная частота
(8.24)
где f н - выраженав герцах;τ и - в секундах.
5. Чувствительность (нормальное значение калиброванного коэффициента отклонения). Чувствительность ε определяют как отношение видимого отклонения луча в миллиметрах к значению вызвавшего его входного сигнала в вольтах или милливольтах. Коэффициент отклонения K d - величина, обратная чувствительности.
:
![]() (8.25)
(8.25)
где U BX - значениеамплитудывходногосигнала; l -значение изображенияамплитудыэтогосигнала пооси Y .
Нормируемымипараметрамиосциллографаявляютсявсе калиброванныезначениякоэффициентаотклоненияиих погрешности. Погрешность коэффициента отклонения определяют по формуле
 (8.26)
(8.26)
где K d 0 - номинальноезначение K d , указанноевтехнической документации на конкретный осциллограф.
6. Параметры входов . Например: вход открытый (закрытый), входное сопротивление 1 МОм + 3%, входная емкость, параллельная входному сопротивлению, не более 35пФ+10%.
7. Погрешностикалибраторовамплитудыикалибраторов временных интервалов.
8. Длительностьразверток. Длительностьразверток - это время прямого хода развертки, за которое луч пробегает всю рабочую часть экрана в горизонтальном направлении. ДлительностьпрямогоходаразверткиТ п задается в виде коэффициентов развертки
,(8.27)
где 1 Т - длина отрезка горизонтальной оси, соответствующая длительности Т п. Коэффициент развертки характеризуется диапазоном изменений, основной и дополнительными погрешностями. Погрешность коэффициента развертки
 ,(8.28)
,(8.28)
где К рном - номинальное значение коэффициента развертки.
9. Нелинейность развертки. Значение нелинейности развертки в процентах вычисляют из соотношения
![]() ,(8.29)
,(8.29)
где /-длительность наиболее отличающегося от 1 см, или одного деления шкалы, временного интервала в любом месте рабочей части развертки в пределах рабочей части экрана.
Кроме указанных характеристик в соответствии со стандар тами осциллограф характеризуется следующими параметрами: рабочей частью экрана; минимальной частотой следования развертки; толщиной линий луча электронно-лучевой трубки; допус каемым суммарным значением постоянного и переменного напряжений на входах; максимально допустимым значением амплитуды исследуемого сигнала; минимальным значением и минимальной длительностью исследуемого сигнала, при котором обеспечи вается класс точности осциллографа; дрейфом нуля усилителей; запаздыванием начала развертки относительно сигнала синхронизации (для осциллографов без линии задержки); возможностью синхронизации (внешней, внутренней); разностью фаз между каналами; наводками с канала на канал; конструктивными характеристиками (масса, габариты, питание, климатические усло вия и т. д.).
В зависимости от точностных параметров ЭЛО в соответствий с ГОСТ 22737 - 77 «Осциллографы электронно-лучевые» делятся на четыре классаточности.
О.Стариков
Рассмотрев в предыдущей статье базовую схему ФАПЧ и принцип ее функционирования, теперь приступим к рассмотрению базовой схемы классического ФАПЧ синтезатора частоты, которая представлена на рис. 1.
Рисунок 1. Структурная схема однопетлевого ФАПЧ синтезатора частоты
- RD (Reference Divider) - опорный делитель;
- PD (Phase Detector) - фазовый детектор;
- LPF (Low Pass Filter) - фильтр нижних частот;
- VCO (Voltage-Controlled Oscillator) - генератор управляемый напряжением;
- DFFD (Divider with a float factor of division) - делитель с переменным коэффициентом деления;
- PR (Prescaler) - предварительный делитель частоты;
- SC (Swallowing Counter) - поглощающий счетчик;
- Fref - опорная частота;
- Fout - выходная частота;
- R - коэффициент деления опорного делителя;
- fo - опорная частота после деления;
- f1 - частота после деления в DFFD, (частота сравнения);
- NDFFD - коэффициент деления DFFD (целое число без остатка);
- Ksc - коэффициент деления поглощающего счетчика;
- P/P+n - коэффициент деления прескалера (10/11, 20/22, 30/33, 40/44).
Ниже приведены выражения показывающие связь между опорной частотой, коэффициентами деления счетчиков и выходной частотой.
Шаг сетки частот dF на выходе синтезатора можно рассчитать по формуле:
Отсюда опорная частота после деления в опорном делителе должна быть:
Выражение для определения выходной (синтезируемой) частоты будет иметь вид:
Fout = fo P NDFFD + fo n Ksc
Шаг частоты на единицу кода NDFFD расчитывается, как:
Коэффициент деления NDFFD (целое число без остатка) расчитывается по формуле:
NDFFD = Fout / (fo P)
Коэффициент деления поглощающего счетчика (т.е остаток от деления при вычислениии кода NDFFD, деленный на минимальный шаг сетки частот) расчитывается, как:
Ksc = (Fout / (fo P) - NDFFD) / (n fo)
Так, как в качестве делителя PR используется прескалер с коэффициентами P/P+n, то при вычислении шага сетки частот dF можно заметить, что при использовании коэффициентов деления 20/22 и выше, значение шага сетки частот отличается от опорной частоты на значение nfo, а значение шага частоты на единицу кода NDFFD равно: dFDFFD = fo P или dFDFFD = (dF / n) P , т.к. fo = dF / n, но так, как отношение P/n равно 10 (10/1, 20/2, 30/3, 40/4) получается, что: dFDFFD = 10 dF.
Т.е по сути мы имеем кольцевой делитель по модулю 10. С учетом вышесказанного и анализируя выражения (10) - (14) предыдущей статьи данного цикла, получим еще две формулы, которые отображают весь процесс синтезирования для данной базовой схемы.
Изменение коэффициентов деления DFFD происходит, согласно выражению: (NDFFD (P/n)),т.е всякий раз с каждым новым шагом настройки, на единицу изменяется все выражение в скобках, т.к мы имеем дело с кольцевым делителем. По другому можно записать: (NDFFD x 10) + 1.
Рассмотрим теперь компоненты, на основе которых строится ФАПЧ синтезатор. Одним, из важных узлов, является фазовый детектор, который может быть линейным и выполнен как "четырехквадратный умножитель", или цифровым, выполненный на элементе "Исключающее -ИЛИ". Такой детектор работает с аналоговыми сигналами или с сигналами прямоугольной формы со скважностью 50%. Если на вход такого детектора подать прямоугольные импульсы, то зависимость его выходного напряжения от фазовой разности (при использовании фильтра нижних частот) будет иметь вид показанный на рис. 2.
 Рисунок 2. Зависимость выходного напряжения от фазовой разности для детектора, выполненного на элементе "Исключающее - ИЛИ"
Рисунок 2. Зависимость выходного напряжения от фазовой разности для детектора, выполненного на элементе "Исключающее - ИЛИ"
Детекторы вышеуказанного типа, обладают высокой линейностью и применяются в основном для синхронного детектирования сигналов. Для частотного синтеза сигналов детекторы этого типа мало подходят по причине повышенной остаточной пульсации, даже когда оба сигнала равны по фазе. Это вызывает периодические фазовые изменения, так называемую фазовую модуляцию, и повышенный уровень шума на выходе системы.
Существуют также другой тип детектора, который работает по фронтам прямоугольных импульсов, и обладает чувствительностью только относительно расположения фронтов опорного сигнала и сигнала VCO. Детектор этого типа генерирует выходные импульсы только тогда, когда появляется фазовая разность между опорным сигналом и сигналом VCO. Эти импульсы по ширине равны промежутку времени между соответствующими фронтами двух входных сигналов, и называются как, импульсы "опережения" или "отставания" во время действия которых, схема источника тока либо "отводит", либо "отдает" ток. Во время же отсутствия этих импульсов, выход фазового детектора находится в разомкнутом состоянии. На рис. 3. показана зависимость выходного напряжения от фазовой разности для такого детектора.
 Рисунок 3. Зависимость выходного напряжения от фазовой разности для детектора, работающего по фронтам прямоугольных импульсов
Рисунок 3. Зависимость выходного напряжения от фазовой разности для детектора, работающего по фронтам прямоугольных импульсов
Конденсатор фильтра нижних частот является элементом запоминания напряжения, которое поддерживает требуемую частоту настройки VCO. Об этом свойстве "памяти" мы говорили в первой части цикла, когда рассматривали контуры регулирования "первого" и "второго" порядка.
Т.е, при фазовой разности, фазовый детектор данного типа, генерирует последовательность импульсов, которые с выхода источника тока в виде управляющего напряжения соответствующей полярности, заряжают или разряжают конденсатор фильтра до напряжения синхронизма VCO и системы в целом. Поскольку, во время отсутствия импульсов рассогласования выход фазового детектора является разомкнутым (на практике все же возможен эффект дрейфа VCO или холостого хода), то и отсутствуют остаточные пульсации и фазовая модуляция, а соответственно уменьшается суммарный уровень шума системы.
На рис. 4 приведена принципиальная схема детектора, работающего по фронтам прямоугольных импульсов, выполненного на триггерах D - типа.
 Рисунок 4. Схема фазового детектора, состоящая из двух триггеров D - типа.
Рисунок 4. Схема фазового детектора, состоящая из двух триггеров D - типа.
В этом устройстве, D - триггер запускается по положительным фронтам входных прямоугольных импульсов, и имеет следующие выходные состояния:
- 11 - оба выхода имеют высокое состояние, и подключены через схему AND (U3) назад ко входам CLR обоих триггеров.
- 00 - при таком состоянии выходов Q1 и Q2 оба транзистора P1 и N1 закрыты, и выход OUT имеет по существу высокий импенданс, т.е. разомкнутое состояние.
- 10 - при таком состоянии выходов, транзистор P1 открыт, а N1 закрыт и на выходе присутствует положительный потенциал источника питания.
- 01 - в этом случае транзистор P1 закрыт, а N1 открыт и на выходе присутствует отрицательный потенциал источника питания.
Элемент задержки DELAY включенный между выходом элемента U3 и входами CLR триггеров препятствует дрейфу VCO и способствует более четкому вхождению системы в синхронизм.
Так, в момент времени, когда оба сигнала на входах +IN и -IN стремятся стать равными, процесс изменения выходной частоты VCO замедляется, в результате чего на выходе источника тока появляется некоторая ненулевая компонента сигнала, так называемые "ни положительные - ни отрицательные" импульсы тока. Появление таких импульсов вызвало бы существенный дрейф VCO, в результате которого, снова появились бы или положительные или отрицательные импульсы рассогласования, и процесс снова бы повторился. Этот эффект циклической работы, вызвал бы появление на выходе источника тока модулированного сигнала, который являлся бы субгармоникой входной опорной частоты фазового детектора. Такой сигнал привел бы к очень существенным наводкам в выходном спектре VCO. Этот циклической эффект называют еще эффектом холостого хода, или люфта. С элементом задержки, даже когда оба входные сигналы равны по фазе, источником тока все еще будут генерироваться импульсы, которые не дадут VCO дрейфовать, и введут систему в синхронизм.
Кстати, необходимо заметить, что когда рассогласование на входах +IN и -IN существенное, то здесь, наоборот происходит быстрое изменение выходной частоты VCO. Сигнал рассогласования, поэтому является асиметричным и меняется более медленно в той части цикла, где сигналы на входах +IN и -IN стремятся сравняться, и наоборот.
Последние замечания относительно элемента задержки и дрейфа VCO как раз объясняют то, что теоретически, казалось бы при равенстве входных сигналов, выход фазового детектора должен быть разомкнут, а практически возникает несколько другая неприятная ситуация, вызывающая этот самый дрейф. В зарубежной литературе, импульс формируемый элементом задержки DELAY называют антилюфтовым широким импульсом (anti - backlash pulse width).
Типовой расчет фильтра нижних частот и расчет общего коэффициента передачи контура приведен в . Также на сайте www.analog.com представлена программа расчета фильтра нижних частот "Loop Filter Design".
Опорный делитель RD, имеет, как правило, набор фиксированных коэффициентов деления задаваемых программно, которые определяют значение опорной частоты. Значение опорной частоты, находится обычно в диапазоне от нескольких десятков до сотен килогерц. В качестве базового источника опорной частоты используют или кварцевый резонатор на несколько мегагерц (десятков мегагерц), или термостатированный генератор. Необходимо заметить, что стабильность частоты кварцевого резонатора или термостатированного генератора в большой степени (если не в основной), определяет стабильность всей системы в целом, т.к. опорная частота fo, по сути является эталонной. Создание высокостабильных термостатированных источников частоты является достатотчно ответственным делом, и требует отдельного разговора. Делитель с переменным коэффициентом деления DFFD также является программируемым, который задает отношение между входной и выходной частотами. Реализация такого делителя производится на основе счетчиков с разрядностью, определяемой максимальным коэффициентом деления. По сути, изменением коэффициента деления этого делителя мы изменяем значение выходной частоты.
Прескалер PR - это предварительный делитель частоты, который имеет двойной коэффициент деления. Эта структура возникла как решение проблемы, связанной с использованием достаточно высоких частот (от сотен МГц до нескольких ГГц) на выходе VCO.
Если такую частоту непосредственно подавать на вход делителя с переменным коэффициентом деления, то при опорной частоте равной 10 кГц и частоте VCO, скажем 1 ГГц, потребуется коэффициент деления порядка 100000, что в свою очередь потребует применения в качестве делителя с переменным коэффициентом деления по крайней мере 17- разрядного счетчика, который в добавок ко всему должен быть способен работать на данной входной частоте. Чтобы получать на выходе VCO такие достаточно высокие частоты и функционировать в этом диапазоне, перед делителем с переменным коэффициентом деления включают прескалер, который понижает выходную частоту до диапазона, в котором функционирует стандартная КМОП логика. Однако, при использовании двух модульного прескалера типа P/P+n в синтезаторе, выполненном согласно структурной схемы на рис. 1, падает разрешающая способность системы (увеличивается шаг сетки частот), т.к. dF = fo n.
Если бы, в качестве предварительного делителя использовался простой прескалер с коэффициентом деления P, то dF было бы равно fo, а выходная частота опредялалась бы как:
Fout = fo P NDFFD + fo Ksc
На практике отношения значений Fout, fo, NDFFD и P стараются выбирать такими, чтобы значение поглощающего счетчика было равно нулю (тогда его можно в принципе исключить из схемы) и выходная частота для схемы простого прескалера будет определяться, как:
Fout = fo P NDFFD
Структурная схема синтезатора изображенная на рис. 5, позволяет поддерживать выходную разрешающую способность системы, как fo, при использовании двух модульного прескалера, c коэффициентами деления P/P+1.
 Рисунок 5. Структурная схема синтезатора частоты на базе двух модульного прескалера с поддержкой разрешающей способности системы
Рисунок 5. Структурная схема синтезатора частоты на базе двух модульного прескалера с поддержкой разрешающей способности системы
Однако, здесь необходимо учитывать следующее:
- Выходные сигналы обоих счетчиков находятся в высоком состоянии, если они (счетчики) "не определены", т.е. не подключены, и находятся в режиме ожидания. Подключение счетчиков происходит при определенной выходной частоте прескалера. (Об этом, будет рассказано в следующих статьях цикла, когда будет рассматриваться конкретная компонентная реализация).
- Когда счетчик B подключен, его выход принимает низкое состояние, и разрешается загрузка обоих счетчиков новыми значениями.
- Значение, загружаемое в счетчик B, должно быть всегда больше значения загружаемого в счетчик A.
Предположим, что счетчик В только что подключился, и в оба счетчика загружены новые значения А и В. Это позволяет найти количество циклов VCO, необходимых для того, чтобы привести его снова в состояние стабильности. Пока счетчик А не подключен, прескалер делит (уменьшает) частоту на P+1. Так, оба счетчика будут вести счет, уменьшая значения на 1, и каждый раз прескалер будет считать (P+1) циклов VCO. Таким образом, счетчик A будет подключен после ((P+1) x A) циклов VCO. В этот момент прескалер подключается к делителю P. Также, можно сказать, что в это время счетчик B все еще имеет (B - A) циклов перед тем, как переключиться в режим ожидания. Это будет до тех пор, пока получим состояние ((B - A) x P). Система теперь стремится назад к начальному условию, из которого мы ее запустили. Общее количество циклов VCO, необходимых для того, чтобы это случилось.
N = (A x (P +1)) + ((B - A) x P) = AP + A +BP - AP = A +BP
При использовании двух модульного прескалера необходимо учитывать самые низкие и самые высокие значения N. Эти значения должны быть такими, чтобы получить действительный диапазон, позволяющий изменять N с дискретным целым шагом.
Полагают, что выражение N = A + BP, гарантирующее непрерывное разнесение целого числа для N, должно быть в диапазоне от 0 до (P -1). Тогда, каждый раз увеличивая В, имеется достаточно разрешающей способности, чтобы заполнить все значения целого числа между ВР и (В+1) x Р. Как было уже отмечено выше, для функционирования двух модульного прескалера, значение В должно быть больше (или равно) А. Минимальное значение для N, имеющее способность к приращению в дискретных целых шагах, может быть получено как:
Nmin = (Bmin x P) +Amin = ((P - 1)) x P) + 0 = P? - P
а максимальное как:
Nmax = (Bmax x P) +Amax
В этом случае значения Amax и Bmax определяются разрядностью счетчиков A и B.
Следующим, достаточно важным узлом, является генератор управляемый напряжением - VCO. Развитию этой темы можно было бы посвятить не одну публикацию, т.к. это достаточно важное устройство, которое должно обеспечивать высокие характеристики по стабильности частоты, шумовым параметрам, не подвергаться самовозбуждению и генерировать спектрально чистый сигнал во всем частотном диапазоне. Проектирование и конструирование генераторов управляемых напряжением (как в прочем и других узлов ВЧ и СВЧ техники) требует хороших знаний и наличие практического опыта в высокочастотной схемотехнике. К счастью, в настоящее время существуют законченные модули VCO, которые обеспечивают хорошие характеристики для всевозможных применений. Такими примерами могут служить VCO 190-902T компании Vari - L (www.vari-L.com ), MC1648 компании MOTOROLA (motorola.com ), MQE520 - 1800 Murata, а также VCO таких производителей, как, Alps, Mini-Circuits, Z-Comm, Micronetics. Все вышеперечисленные элементы, входящие в состав ФАПЧ синтезаторов частот как правило выполняются в едином конструктивном исполнении (за исключением фильтра нижних частот и VCO) и представляют собой самостоятельный узел выполненный в виде интегральной схемы. Здесь необходимо однако оговориться по поводу отдельной реализации VCO, т.к. уже существуют однокристальные устройства реализующие в себе полный синтезатор с VCO и ряд дополнительных блоков. О таких устройствах для СВЧ применений говорилось уже на страницах журнала CHIP NEWS, в частности в №4 за 2001 год стр. 30 - 31, 48 - 49.
В заключении этой статьи хотелось бы уделить внимание важной для ФАПЧ систем теме - фазовому шуму. Существует так называемая, долгосрочная и краткосрочная стабильность частоты системы ФАПЧ и синтезаторов. Если долгосрочная характеризует стабильность частоты в течении длительного периода времени (часы, дни, недели), то краткосрочная стабильность характеризует изменения происходящие в течении секунд или долей секунд. Эти краткосрочные изменения могут быть случайными или периодическими, и представляют собой спектр со случайными и дискретными частотными составляющими, которые порождают широкие всплески и побочные пики в спектре выходного сигнала. Дискретные побочные составляющие вызваны тактовой частотой опорного источника сигнала, интерференцией линии питания и продуктами преобразования. Расширение, вызванное флуктуацией случайных помех называется фазовым шумом, и может являться следствием теплового, дробового и фликкер шума в активных и пассивных компонентах. К выходному сигналу VCO добавляется сигнал ошибки, значение которой определяется как средне - квадратичное значение фазовой флуктуации (погрешности фазы или колебания) и может быть выражено в пикосекундах или в градусах среднеквадратичного значения. Важно заметить, что полный выходной шум зависит от шума, вносимого каждым элементом схемы, т.е. от шума фазового детектора, источника тока, делителей, VCO, и может быть рассчитан, как шум подаваемый назад на вход фазового детектора. Чтобы определить полный шум на выходе системы, необходимо все составляющие представить в среднеквадратичном значении.
S2 = X2 + Y2 + Z2
где, S2 - полная мощность фазового шума на выходе системы;
X2 - мощность шума опорного делителя и делителей цепи обратной связи, подаваемая на входы фазового детектора;
Y2- мощность шума на выходе источника тока, обусловленная шумами от вышеперечисле - нных делителей и собственно, от шума самого фазового детектора и источника тока;
Z2 - мощность шума, вносимого VCO.
Необходимо вспомнить, что характеристика фильтра нижних частот с частотой среза на уровне 3 dB, обозначает ширину полосы пропускания контура Bw. Для частотных сдвигов на выходе меньше, чем Bw доминируют значения шума X и Y, а для частотных сдвигов намного больше, чем Bw доминируют значения фазового шума Z. Малое значение для Bw наиболее предпочтительно, т.к. позволяет минимизировать общее значение фазового шума, однако, может быть следствием медленного переходного процесса. Поэтому, определение ширины полосы пропускания должно зависеть от переходной характеристики и полной мощности интегрированного фазового шума.
Литература
- Curtin M., O"Brien P. Phase-Locked Loops for High-Frequency Receivers and Transmitters - Part 2 Analog Dialogue 33 - 5 (1999).
- Curtin M., O"Brien P. Phase-Locked Loops for High-Frequency Receivers and Transmitters - Part 3 Analog Dialogue 33 - 7 (1999).
- Horowitz P., Hill W. The Art of Electronics, Second Edition, Cambridge University Press 1989.
- SGS - THOMSON Microelectronics, Micropower Phase-Locked Loop, 1994.
Согласно последним данным статистики примерно 70% всей выработанной электроэнергии в мире потребляет электропривод. И с каждым годом этот процент растет.
При правильно подобранном способе управления электродвигателем возможно получение максимального КПД, максимального крутящего момента на валу электромашины, и при этом повысится общая производительность механизма. Эффективно работающие электродвигатели потребляют минимум электроэнергии и обеспечивают максимальную экономичность.
Для электродвигателей, работающих от преобразователя частоты ПЧ, эффективность во многом будет зависеть от выбранного способа управления электрической машиной. Только поняв достоинства каждого способа, инженеры и проектировщики систем электроприводов смогут получить максимальную производительность от каждого способа управления.
Содержание:
Способы контроля
Многие люди, работающие в сфере автоматизации, но не сталкивающиеся вплотную с процессами разработки и внедрения систем электроприводов полагают, что управление электродвигателем состоит из последовательности команд, вводимых с помощью интерфейса от пульта управления или ПК. Да, с точки зрения общей иерархии управления автоматизированной системой это правильно, однако есть еще способы управления самим электродвигателем. Именно эти способы и будут оказывать максимальное влияние на производительность всей системы.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существует четыре основных способа управления:
- U/f – вольт на герц;
- U/f с энкодером;
- Векторное управление с разомкнутым контуром;
- Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
Широтно-импульсная модуляция применяется к преобразователю частоты путем использования фиксированного напряжения шины постоянного тока. путем быстрого открытия и закрытия (правильней сказать коммутации) генерируют выходные импульсы. Варьируя ширину этих импульсов на выходе получают «синусоиду» нужной частоты. Даже если форма выходного напряжения транзисторов импульсная, то ток все равно получается в виде синусоиды, так как электродвигатель имеет индуктивность, которая влияет на форму тока. Все методы управления основываются на ШИМ модуляции. Разница между методами управления заключается лишь в методе вычисления подаваемого напряжения на электродвигатель.
В данном случае несущая частота (показана красным) представляет собой максимальную частоту коммутации транзисторов. Несущая частота для инверторов, как правило, лежит в пределах 2 кГц – 15 кГц. Опорная частота (показана синим) представляет собой сигнал задания выходной частоты. Для инверторов применимых в обычных системах электроприводов, как правило, лежит в пределах 0 Гц – 60 Гц. При накладывании сигналов двух частот друг на друга, будет выдаваться сигнал открывания транзистора (обозначен черным цветом), который подводит силовое напряжение к электродвигателю.
Способ управления U/F
Управление вольт-на-герц, наиболее часто называемое как U/F, пожалуй, самый простой способ регулирования. Он часто используется в несложных системах электропривода из-за своей простоты и минимального количества необходимых для работы параметров. Такой способ управления не требует обязательной установки энкодера и обязательных настроек для частотно-регулируемого электропривода (но рекомендовано). Это приводит к меньшим затратам на вспомогательное оборудование (датчики, провода обратных связей, реле и так далее). Управление U/F довольно часто применяют в высокочастотном оборудовании, например, его часто используют в станках с ЧПУ для привода вращения шпинделя.

Модель с постоянным моментом вращения имеет постоянный вращающий момент во всем диапазоне скоростей при одинаковом соотношении U/F. Модель с переменным соотношением вращающего момента имеет более низкое напряжение питания на низких скоростях. Это необходимо для предотвращения насыщения электрической машины.
U/F — это единственный способ регулирования скорости асинхронного электродвигателя, который позволяет регулирование нескольких электроприводов от одного преобразователя частоты. Соответственно все машины запускаются и останавливаются одновременно и работают с одной частотой.
Но данный способ управления имеет несколько ограничений. Например, при использовании способа регулирования U/F без энкодера нет абсолютно никакой уверенности, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины при частоте 3 Гц ограничивается 150%. Да, ограниченного крутящего момента более чем достаточно для применения в большинстве существующего оборудования. Например, практически все вентиляторы и насосы используют способ регулирования U/F.
Данный метод относительно прост из-за его более «свободной» спецификации. Регулирование скорости, как правило, лежит в диапазоне 2% — 3% максимальной выходной частоты. Отклик по скорости рассчитывается на частоту свыше 3 Гц. Скорость реагирования частотного преобразователя определяется быстротой его реакции на изменение опорной частоты. Чем выше скорость реагирования – тем быстрее будет реакция электропривода на изменение задания скорости.
Диапазон регулирования скорости при использовании способа U/F составляет 1:40. Умножив это соотношение на максимальную рабочую частоту электропривода, получим значение минимальной частоты, на которой сможет работать электрическая машина. Например, если максимальное значение частоты 60 Гц, а диапазон составляет 1:40, то минимальное значение частоты составит 1,5 Гц.
Паттерн U/F определяет соотношение частоты и напряжения в процессе работы частотно-регулируемого электропривода. Согласно ему, кривая задания скорости вращения (частота электродвигателя) будет определять помимо значения частоты еще и значения напряжения, подводимого к клеммам электрической машины.
Операторы и технические специалисты могут выбрать необходимый шаблон регулирования U/F одним параметром в современном частотном преобразователе. Предустановленные шаблоны уже оптимизированы под конкретные применения. Также существуют возможности создания своих шаблонов, которые будут оптимизироваться под конкретную систему частотно-регулируемого электропривода или электродвигателя.
Такие устройства как вентиляторы или насосы имеют момент нагрузки, который зависит от скорости их вращения. Переменный крутящий момент (рисунок выше) шаблона U/F предотвращает ошибки регулирования и повышает эффективность. Эта модель регулирования уменьшает токи намагничивания на низких частотах за счет снижения напряжения на электрической машине.
Механизмы с постоянным крутящим моментом, такие как конвейеры, экструдеры и другое оборудование используют способ регулирования с постоянным моментом. При постоянной нагрузке необходим полный ток намагничивания на всех скоростях. Соответственно характеристика имеет прямой наклон во всем диапазоне скоростей.

Способ управления U/F с энкодером
Если необходимо повысить точность регулирования скорости вращения в систему управления добавляют энкодер. Введение обратной связи по скорости с помощью энкодера позволяет повысить точность регулирования до 0,03%. Выходное напряжение по-прежнему будет определятся заданным шаблоном U/F.
Данный способ управления не получил широкого применения, так как представляемые им преимущества по сравнению со стандартными функциями U/F минимальны. Пусковой момент, скорость отклика и диапазон регулирования скорости – все идентично со стандартным U/F. Кроме того, при повышении рабочих частот могут возникнуть проблемы с работой энкодера, так как он имеет ограниченное количество оборотов.
Векторное управление без обратной связи
Векторное управление (ВУ) без обратной связи используется для более широкого и динамичного регулирования скорости электрической машины. При пуске от преобразователя частоты электродвигатели могут развивать пусковой момент в 200% от номинального при частоте всего 0,3 Гц. Это значительно расширяет перечень механизмов, где может быть применен асинхронный электропривод с векторным управлением. Этот метод также позволяет управлять моментом машины во всех четырех квадрантах.

Ограничение вращающего момента осуществляется двигателем. Это необходимо для предотвращения повреждения оборудования, машин или продукции. Значение моментов разбивают на четыре различных квадранта, в зависимости направления вращения электрической машины (вперед или назад) и в зависимости от того, реализует ли электродвигатель . Ограничения могут устанавливаться для каждого квадранта отдельно или же пользователь может задать общий вращающий момент в преобразователе частоты.
Двигательный режим асинхронной машины будет при условии, что магнитное поле ротора отстает от магнитного поля статора. Если магнитное поле ротора начнет опережать магнитное поле статора, то тогда машина войдет в режим рекуперативного торможения с отдачей энергии, проще говоря – асинхронный двигатель перейдет в генераторный режим.
Например, машина по закупорке бутылок может использовать ограничение момента в квадранте 1 (направление вперед с положительным моментом) для предотвращения чрезмерного затягивания крышки бутылки. Механизм производит движение вперед и использует положительный момент для того, чтобы закрутить крышку бутылки. А вот устройство, такое как лифт, с противовесом тяжелее, чем пустая кабина, будет использовать квадрант 2 (обратное вращение и положительный момент). Если кабина подымается на верхний этаж, то крутящий момент будет противоположен скорости. Это необходимо для ограничения скорости подъема и недопущения свободного падения противовеса, так как он тяжелее, чем кабина.
Обратная связь по току в данных преобразователях частоты ПЧ позволяет устанавливать ограничения по моменту и току электродвигателя, поскольку при увеличении тока растет и момент. Выходное напряжение ПЧ может изменятся в сторону увеличения, если механизм требует приложения большего крутящего момента, или уменьшатся, если достигнуто его предельно допустимое значение. Это делает принцип векторного управления асинхронной машиной более гибким и динамичным по сравнению с принципом U/F.
Также частотные преобразователи с векторным управлением и разомкнутым контуром имеют более быстрый отклик по скорости – 10 Гц, что делает возможным его применение в механизмах с ударными нагрузками. Например, в дробилках горной породы нагрузка постоянно меняется и зависит от объема и габаритов обрабатываемой породы.
В отличии от шаблона управления U/F векторное управление использует векторный алгоритм, для определения максимально эффективного напряжения работы электродвигателя.

Векторное управления ВУ решает данную задачу благодаря наличию обратной связи по току двигателя. Как правило, обратная связь по току формируется внутренними трансформаторами тока самого преобразователя частоты ПЧ. Благодаря полученному значению тока преобразователь частоты проводит вычисления вращающего момента и потока электрической машины. Базовый вектор тока двигателя математически расщепляется на вектор тока намагничивания (I d) и крутящего момента (I q).
Используя данные и параметры электрической машины ПЧ вычисляет векторы тока намагничивания (I d) и крутящего момента (I q). Для достижения максимальной производительности, преобразователь частоты должен держать I d и I q разведенными на угол 90 0 . Это существенно, так как sin 90 0 = 1, а значение 1 представляет собой максимальное значение крутящего момента.

В целом векторное управление асинхронным электродвигателем осуществляет более жесткий контроль. Регулирование скорости составляет примерно ±0,2% от максимальной частоты, а диапазон регулирования достигает 1:200, что позволяет сохранять вращающий момент при работе на низких скоростях.
Векторное управление с обратной связью
Векторное управление с обратной связью использует тот же алгоритм управления, что и ВУ без обратной связи. Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машиной, а моментом. В некоторых механизмах именно значение момента имеет большую важность. Например, мотальная машина, механизмы закупорки и другие. В таких устройствах необходимо регулировать момент машины.

Синтезатор предназначен для работы в качестве задающего генератора передатчика для индивидуального радиовещания, и разработан в порядке реализации Рекомендаций круглого стола «Индивидуальное (любительское) радиовещание в России» , прошедшего 18 ноября 2009 года при поддержке Федерального Агентства по печати и массовым коммуникациям.
Часть 1. Параметры, структурная схема и принцип работы.
Часть 2. Элементная база и принципиальная схема.
Часть 3. Конструкция, детали, сборка, регулировка.
Параметры. В диапазонах 200 и 180 метров синтезатор формирует сетку из 40-а радиочастот с шагом 9 кГц, принятом для радиовещания на средних и длинных волнах в соответствии с Международным Регламентом Радиосвязи . Частота (номер канала, кратный 9 КГц) набирается на двух переключателях. Синтезатор выдает половинную частоту с половинной сеткой частот для построения тракта формирования несущей на более низкой частоте, чтобы в предвыходном каскаде передатчика (в удвоителе) перейти на рабочую частоту, а затем подать сигнал на выходной каскад. Такое техническое решение применено для увеличения устойчивости передатчика и упрощения его наладки в любительских условиях.
В диапазоне 200 метров перекрываются частоты: 1449-1620 кГц, в диапазоне 180 метров: 1629-1800 кГц. Стабильность частоты обеспечивается опорным кварцевым генератором на частоту 90 или 180 кГц и при использовании вакуумного резонатора, при комнатной температуре составляет 1,5×10 −6 . С использованием внешнего делителя частоты в синтезаторе можно использовать любые кварцевые резонаторы, которые при делении дают точный номинал частоты 45 кГц. Для подключения внешнего делителя частоты или внешнего опорного генератора на плате синтезатора предусмотрен разрыв цепи сигнала опорной частоты (перемычка П3). Синтезатор выполнен на микросхемах серий ТТЛ. Форма выходного сигнала и его параметры оптимизированы под удобство и простоту построения следующих каскадов АМ радиопередатчика.
Питается синтезатор от нестабилизированного источника с напряжением 15-20 вольт, потребляя ток менее 200 мА. Габаритные размеры 120×104×40 мм.
Поскольку одной из главных целей Индивидуального радиовещания, как любительской деятельности, является увлечение, воспитание и начальное образование будущих специалистов в области радиотехники, радиосвязи и радиовещания, данное описание выполнено с объяснениями теоретических аспектов, и детальным изложением принципов работы устройства. Оно может быть использовано, как одно из пособий при подготовке к квалификационному экзамену по радиотехнике для начинающих и опытных индивидуальных радиовещателей.
Структурная схема (Рис. 1). Синтезатор выполнен на основе фазовой автоматической подстройки частоты (ФАПЧ) аналогового высокочастотного автогенератора с последующим делением частоты сформированного сигнала до нужного номинала. Для формирования сетки частот используется делитель с переменным коэффициентом деления в цепи обратной связи.
Синтезатор включает в себя три структурных звена:
- канал основного сигнала: Генератор, управляемый напряжением (ГУН), Буферный усилитель — формирователь импульсов (БУФИ), Делитель частоты с N = 10, Распределитель импульсов на две последовательности со скважностью 5 и выходной каскад с ключевыми транзисторами.
- канал опорной частоты: Опорный кварцевый генератор (ОКГ) и Делитель с фиксированным коэффициентом деления (ДФКД), чтобы получить нужный номинал опорной частоты.
- петля обратной связи: Делитель с переменным коэффициентом деления (ДПКД), цифровой Частотно-фазовый детектор (ЧФД), аналоговый Фильтр нижних частот (ФНЧ), аналоговый Интегратор, выполненный на операционном усилителе, сигнал с которого управляет варикапами в ГУН.
Работа структурной схемы. Для синтезатора выбрана частота формирования в пять раз выше выходной частоты. Это сделано для ослабления влияния наводок с выхода передатчика на работу ГУН. При таком соотношении частот также удобно формировать на выходе синтезатора две парафазных последовательности импульсов со скважностью 5 на половинной частоте, путем деления и последующего распределения импульсов. Выходной сигнал синтезатора такой формы выбран для того, чтобы значительно упростить построение следующих каскадов передатчика и сократить их количество. Одновременно с этим, деление частоты после ее формирования, сокращает уровень фазовых шумов синтезатора в коэффициент деления раз, что важно для формирования качественного радиовещательного сигнала.
Канал опорной частоты. Поскольку формирование сетки частот идет на пятикратной частоте, то, опорная частота должна быть также в пять раз выше, чем шаг сетки частот, и составляет 9×5 = 45 кГц. Высокостабильные вакуумные кварцевые резонаторы на столь низкую частоту имеют сравнительно большие габариты и неудобны в эксплуатации. Поэтому в схеме присутствует ДФКД, обеспечивающий применение кварцевого резонатора на вдвое или вчетверо большую частоту: 90 или 180 кГц.
Канал основного сигнала. Генерирует пятикратную частоту (7,25-9,0 МГц), преобразует синусоидальные колебания в импульсы со скважностью , близкой к двум (меандр), делит частоту в 10 раз до получения половинной частоты, распределяет импульсы через один для получения скважности 5 на две парафазных последовательности и обеспечивает два мощных выхода, переключающих токи до 200 мА при напряжении до 30 вольт. Такой уровень выходного сигнала необходим, чтобы коммутировать цепи катодов радиоламп предвыходного каскада передатчика.
Собственно, изюминкой этой схемы является идея формирования на выходе синтезатора двух парафазных последовательностей импульсов половинной частоты со скважностью 5 (Рис. 2).

Счетчик (делитель) на 10 построен из счетчика на 5, работающего в коде 1-2-4 и счетного триггера (счетчик на 2), причем, сначала сигнал подается на вход счетчика на 5. Согласно логике работы такого счетчика на его выходе СТ2 имеется последовательность импульсов, период которых равен пяти периодам входного сигнала, а длительность положительного импульса равна двум периодам. То есть, скважность импульсов равна 2,5. Если такую последовательность «рассчитать на первый-второй» и «первые» и «вторые» импульсы направить каждый на свой выход, то в результате получатся две последовательности импульсов, каждая со скважностью 5.
Рассчитывает импульсы на «первый-второй» счетный триггер (делитель на 2). Далее, на двух логических элементах 2И-НЕ выполнен распределитель импульсов. На первые входа обоих логических элементов поступает последовательность с выхода СТ2, а вторые выходы коммутируются счетным триггером в противофазе. Таким образом с выхода логических элементов мы имеем две последовательности импульсов с выхода СТ2, но разобранные через один. То есть, с частотой в два раза меньшей, чем на выходе СТ2. Однако, что замечательно, — обе выходных последовательности сдвинуты по фазе относительно друг друга ровно на половину периода.
А вот теперь — самое интересное. Зачем все это нужно.
Половинная частота выхода синтезатора (разумеется, и с половинной сеткой номиналов частот) нужна для того, чтобы дальнейший усилительный тракт передатчика не работал бы весь на одной частоте, и его даже в любительских условиях, при непрофессионально выполненном монтаже, можно было бы сделать устойчивым к самовозбуждению. То есть, частота синтезатора в дальнейших каскадах передатчика должна удваиваться. Как правило, удвоение частоты производится в предвыходном каскаде уже при значительной мощности сигнала (единицы ватт) и таким образом тракт усиления сигнала выходной частоты содержит всего один каскад. Обратим внимание, что в аналоговых узлах синтезатора нигде нет каскадов, работающих на выходной частоте и подверженных, таким образом, наводкам мощного сигнала с выхода передатчика.
Скважность последовательности импульсов, равная пяти близка к оптимальной при возбуждении колебательного контура удвоителя частоты прямоугольными импульсами. То есть, в ламповом удвоителе частоты, при подаче импульса тока, равного по длительности 1/5 части периода резонансной частоты, в его контуре после каждого импульса будут возникать два периода автоколебаний. Теперь вспомним, что у нас имеются две последовательности таких импульсов, сдвинутых по фазе относительно друг друга на половину периода. Иными словами, у нас есть возможность с помощью второго источника тока (второй лампы) подпитать контур удвоителя во время второго периода автоколебаний, сделав, таким образом, двухпериодный удвоитель частоты.

Достоинства такой схемы: отсутствие в спектре выходного сигнала половинной частоты и в два раза большая мощность. Эти достоинства позволяют полностью изъять из передатчика тракт усиления на половинной частоте, подключив вход удвоителя (катоды ламп) непосредственно к выходу транзисторных ключей синтезатора (Рис. 3). Это также дает возможность сократить число резонансных колебательных систем в передатчике до одной (в выходном каскаде) при высокой степени чистоты спектра сигнала на выходе передатчика. Применение этого синтезатора позволяет собрать простой, двухламповый, АМ радиопередатчик вполне доступный радиолюбителям и индивидуальным вещателям среднего уровня квалификации.
Мощность транзисторных ключей синтезатора выбрана достаточной для управления по цепи катода такими радиолампами, как 6Ж4, 6Ж4П, 6Ж5П, 6Ж11П, 6П15П, 6П9, 6П37Н или иными ВЧ пентодами, имеющими отдельный вывод защитной сетки, или тетродами; импульс тока катода которых не превышает 300 миллиампер и напряжение запирания лампы не более минус 30 вольт. Для использования в этой схеме непригодны радиолампы, в которых защитная сетка соединена с катодом внутри баллона, а также почти все лучевые тетроды, у которых лучеобразующие пластины также соединены с катодом.
Петля обратной связи. Обеспечивает привязку частоты выходного сигнала синтезатора к опорной частоте с точностью до фазы. Текущий коэффициент пересчета ДПКД определяется соотношением номинала выходной частоты и шагом сетки частот. Число значений ПКД определяется диапазоном перестройки синтезатора, то есть, числом рабочих частот. В нашем случае ПКД изменяется от 160 до 199 плюс 1 на такт загрузки кода КД. Набор частоты в этом случае можно выполнить на двух переключателях: на десять положений — «единицы» и на 4 положения — «десятки». Для синтезатора радиовещательного передатчика, где нужно встать на выбранную частоту и далее не сдвигаться с нее в течение нескольких часов ведения радиопередачи, необходимо обеспечить жесткую фиксацию номинала частоты, поэтому регуляторы с плавной перестройкой здесь нежелательны. В данном синтезаторе фиксация выбранной рабочей частоты достигается набором коэффициента деления с помощью механических переключателей.
Принцип работы ДПКД основан на использовании вычитающих счетчиков с возможностью параллельной записи в них, как в регистр, начального числа. То есть, во время начального такта в счетчик записывается число (требуемый КД) после чего с каждым тактом счета (с каждым входным импульсом) идет вычитание по единичке. Когда текущее число достигает нуля, ДПКД дает команду на новую параллельную запись в счетчик числа, набранного на переключателях. Такт загрузки начального числа добавляет к общему коэффициенту пересчета единичку. Поэтому коэффициент деления получается на единичку больше, чем реально набранное на переключателях число. Для нашего случая это даже удобно.

Теперь посмотрим, как все это работает (Рис. 4). Из предварительно записанного в счетчики числа текущего значения КД (на схеме, на переключателях П1 и П2-3 показано значение 72; добавляем 100 — старший разряд синтезатора, и вычитаем единицу, получаем КД = 171) с каждым приходящим входным импульсом происходит вычитание по единичке. Когда текущее значение числа достигнет 100 (верхняя временная диаграмма на Рис. 4) и во второй половине такта входной сигнал (А) установится в значение логического нуля, на выходе P 0 сначала счетчика единиц (В), а затем и счетчика десятков (E) сформируется нулевой импульс. Эти импульсы запаздывают друг относительно друга и от входного импульса на величину задержки формирования сигнала переноса счетчиками (временной масштаб для микросхем 533/555 серий указан на временных диаграммах). Положительным фронтом окончания каждый импульс (А и В) завершит последующий (счетчики включены последовательно), а импульс с выхода переноса десятков (E) установит старший разряд счетчика «сотни», имеющий всего два значения и поэтому выполненный в виде триггера, в положение 0. Соответственно, на его инверсном выходе (F) установится единица. Поскольку на входе S триггера загрузки присутствует логический ноль (F), устанавливающий его в единицу, то он не реагирует на сигналы (В и Е) по входам D и С. Далее оба счетчика продолжают вычитать до значения 0. Во второй половине нулевого такта (нижняя временная диаграмма на Рис. 4) будут опять сформированы два импульса переноса, но в этот раз триггеру загрузки единичным уровнем сигнала F на его входе S будет разрешено работать по входам D и C, и он запишет в себя нулевой уровень (Е) по входу D. На выходе триггера загрузки (H) появится нулевой потенциал, который по входам параллельной загрузки C запишет в счетчики число, набранное на переключателях, и по входу S установит триггер сотен в значение 1. Это вызовет появление логического нуля на его инверсном выходе (F), который установит триггер загрузки в положение 1 (H), зафиксировав этим введенные в счетчики начальные значения ПКД с переключателей, и запретит триггеру загрузки реагировать на сигналы по входам D и С.
Далее счетчик снова начнет с каждым пришедшим входным импульсом вычитать из занесенного в него числа по единичке. И так будет продолжаться все время, пока работает синтезатор. При изменении положения переключателей П1 или П2-3, со следующего периода работы счетчика изменится записываемое в него число и поменяется коэффициент деления.
Если вместо триггера сотен в эту же схему установить третий десятичный счетчик, то можно будет на этом же принципе реализовать ДПКД с коэффициентом деления от 1 до 999. Или, для ограничения нужного диапазона КД, использовать в старшем разряде неполный шифратор.
Показанные на схеме Шифраторы представляют собой комбинационные логические схемы, преобразующие 10-и позиционный код (с переключателей П1 и П2-3) в четырехразрядный двоично-десятичный код числа, который будет записываться в регистры счетчиков ДПКД (Рис. 5).

Поскольку в данной схеме синтезатора достаточно 40-а значений кода числа КД (от 160 до 199), то шифратор десятков выполнен неполным, и преобразует в код лишь 4 положения переключателя: числа 6, 7, 8, 9. При проектировании других синтезаторов использование полного шифратора десятков позволит увеличить число кодируемых чисел до 100: от 100 до 199.
Частотно фазовый детектор сравнивает частоту (F1) и фазу последовательности импульсов с выхода ДПКД (частота ГУН, поделенная в ПКД раз) с частотой (F2) и фазой опорного сигнала.

При этом на двух его выходах формируется сигнал, имеющий в своем составе «знак частоты» (больше-меньше), а также две последовательности импульсов в которых скважность пропорциональна разбалансу фаз входных сигналов. Принцип работы схемы заключается в запоминании, с какого входа раньше пришел импульс. В исходном состоянии оба D-триггера взведены в логическую единицу. Поскольку оба их D входа соединены с потенциалом нуля (общий провод), то первый же приходящий импульс сбрасывает один из триггеров в ноль. Импульс, пришедший на вход C другого триггера, также сбросит его в ноль, но при этом на входе логического элемента 2И-НЕ окажутся две единицы с инверсных выходов триггеров и на выходе будет сформирован потенциал логического нуля, который асинхронно взведет оба триггера в исходное состояние логической единицы. Подробно работа схемы показана на временных диаграммах (Рис. 6) на которых приведены оба случая работы схемы при разных соотношениях входных частот. Из диаграмм видно, что информация о разности фаз сигналов содержится в ширине выходных импульсов, а знак частоты соответствует появлению ШИМ последовательности на том выходе детектора, на какой из его триггеров подается сигнал более высокой частоты. На втором выходе при этом будет потенциал логической единицы, прорезанный последовательностью коротких импульсов меньшей частоты.
Фильтр нижних частот обеспечивает устойчивость петли обратной связи, а также преобразует последовательность импульсов с изменяющейся скважностью в постоянное напряжение.
Интегратор «отрабатывает» знак частоты накоплением потенциала на интегрирующей емкости, чем обеспечивается перестройка частоты ГУН. После сравнивания номиналов опорной и поделенной частот, поддерживает нулевое положение фазы сигнала ГУН относительно опорного сигнала. Благодаря наличию интегратора в петле обратной связи ФАПЧ обеспечивается нулевая фазовая ошибка автоподстройки в установившемся режиме. Благодаря тому, что ЧФД выдает знак частоты, а интегратор его накапливает и перестраивает частоту ГУН до совпадения фаз, полоса захвата такой системы ФАПЧ равна диапазону перестройки ГУН. То есть, примененная в синтезаторе петля обратной связи не требует контроля захвата слежения. Единожды будучи отрегулированной при изготовлении синтезатора, она далее автоматически поддерживает свою работоспособность.
1 Радиовещательный позывной, зарегистрированный, как название средства массовой информации: Радиопрограмма «Зеленый глаз». Свидетельство о регистрации СМИ: Эл № ФС77-37059 от 6 августа 2009 г.
3 Русское издание (ITU) Регламента Радиосвязи 2004 года. Выложено
4 Скважность — отношение периода следования импульсов к их длительности. Если Q = 5, то импульс короче периода в 5 раз. При длительности импульса равной половине периода (скважность — 2), их последовательность называется меандр.